
El motor paso a paso es un dispositivo electromecánico que convierte una serie de impulsos eléctricos en desplazamientos angulares discretos, lo que significa es que es capaz de avanzar una serie de grados (paso) dependiendo de sus entradas de control. El motor paso a paso se comporta de la misma manera que un conversión digital-analógica y puede ser gobernado por impulsos procedentes de sistemas lógicos. Este motor presenta las ventajas de tener alta precisión y repetibilidad en cuanto al posicionamiento. Entre sus principales aplicaciones destacan como motor de frecuencia variable, motor de corriente continua sin escobillas, servomotores y motores controlados digitalmente. Los motores paso a paso son ideales para la construcción de mecanismos en donde se requieren movimientos muy precisos. La característica principal de estos motores es el hecho de poder moverlos un paso a la vez por cada pulso que se le aplique. Este paso puede variar desde 90° hasta pequeños movimientos de tan solo 1.8°, es decir, que se necesitarán 4 pasos en el primer caso (90°) y 200 para el segundo caso (1.8°), para completar un giro completo de 360°. Estos motores poseen la habilidad de poder quedar enclavados en una posición o bien totalmente libres. Si una o más de sus bobinas está energizada, el motor estará enclavado en la posición correspondiente y por el contrario quedará completamente libre si no circula corriente por ninguna de sus bobinas.
Tipos de Motores: Bipolar: Estos tiene generalmente cuatro cables de salida (ver figura 1). Necesitan ciertos trucos para ser controlados, debido a que requieren del cambio de dirección del flujo de corriente a través de las bobinas en la secuencia apropiada para realizar un movimiento. En figura 3 podemos apreciar un ejemplo de control de estos motores mediante el uso de un puente en H (H-Bridge). Como se aprecia, será necesario un H-Bridge por cada bobina del motor, es decir que para controlar un motor Paso a Paso de 4 cables (dos bobinas), necesitaremos usar dos H-Bridges iguales al de la figura 3 . El circuito de la figura 3 es a modo ilustrativo y no corresponde con exactitud a un H-Bridge. En general es recomendable el uso de H-Bridge integrados como son los casos del L293 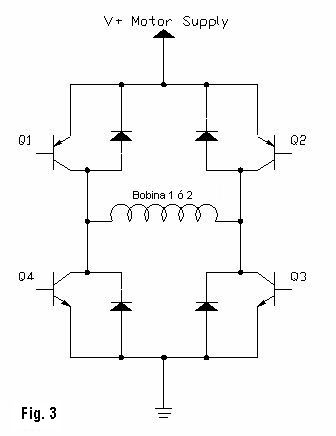 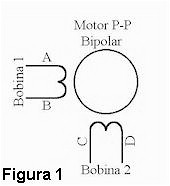 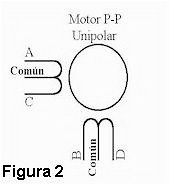
- Unipolar: Estos motores suelen tener 6 o 5 cables de salida, dependiendo de su conexionado interno (ver figura 2). Este tipo se caracteriza por ser más simple de controlar. En la figura 4 podemos apreciar un ejemplo de conexionado para controlar un motor paso a paso unipolar mediante el uso de un ULN2803, el cual es una array de 8 transistores tipo Darlington capaces de manejar cargas de hasta 500mA. Las entradas de activación (Activa A, B , C y D) pueden ser directamente activadas por un microcontrolador.

El motor de paso de rotor de imán permanente: Permite mantener un par diferente de cero cuando el motor no está energizado. Dependiendo de la construcción del motor, es típicamente posible obtener pasos angulares de 7.5, 11.25, 15, 18, 45 o 90°. El ángulo de rotación se determina por el número de polos en el estator El motor de paso de reluctancia variable (VR): Tiene un rotor multipolar de hierro y un estator devanado laminado, y rota cuando los dientes del rotor son atraídos a los dientes del estator electromagnéticamente energizados. La inercia del rotor de un motor de paso de reluctancia variable es pequeña y la respuesta es muy rápida, pero la inercia permitida de la carga es pequeña. Cuando los devanados no están energizados, el par estático de este tipo de motor es cero. Generalmente, el paso angular de este motor de paso de reluctancia variable es de 15° El motor híbrido de paso: Se caracteriza por tener varios dientes en el estator y en el rotor, el rotor con un imán concéntrico magnetizado axialmente alrededor de su eje. Se puede ver que esta configuración es una mezcla de los tipos de reluctancia variable e imán permanente. Este tipo de motor tiene una alta precisión y alto par y se puede configurar para suministrar un paso angular tan pequeño como 1.8°.
Fuente de información; http://es.wikipedia.org / http://www.todorobot.com.ar
| 